Linear Least Squares#
This notebook discusses and explains how to use the linear least squares function, LS, and the linear least squares class, LsClass, available from the TFC utilities. They are used regularly in the context of TFC when minimizing the residual of differential equations, but are written in a general way so that they can be applied to any problem that requires linear least-squares.
The LS function and LsClass can utilize automatic differentiation, so the user need only supply the residual function. Moreover, both are designed to work with unkowns given as an array, a TFCDict, or a TFCRobustDict; the latter two options in particular are extremely useful when one has multiple arrays of unkowns such as in systems of ODEs or PDEs. Moreover, both LS and LsClass JIT the entire linear least-squares process, and provide the option to calculate the run-time
of the compiled code.
LS Function#
The LS function is designed for cases where the linear least-squares needs to be run only once.
Positional input arguments#
This function function takes in two required positional arguments and one optional position argument. The two required positional arguments are the unknowns, filled with zeros, and the residual function: the residual function must be structured such that the unkowns are the first argument. The one optional position argument is *args, which is used if the residual function has more arguments than the unknowns. In other words, the residual function should be of the form, \(\mathbb{L}(\xi,*args)\), where \(\mathbb{L}\) is the residual function, \(\xi\) are the unknowns, and *args are any additional arguments.
Optional input keyword arguments#
The optional keyword arguments to the LS function are:
\(\mathcal{J}\) - User-specified Jacobian. The default option is to compute the Jacobian of \(\mathbb{L}\) with respect to \(\xi\) using the automatic differentiation
timer - Setting this to True will time the linear least squares using the timer specified by timerType. The default is False.
timerType - The timer from the timer package that will be used to time the code. The default is process_time.
method - Method used to invert the matrix at each iteration. The default is pinv. The two options are:
pinv - Uses Numpy’s pinv to perform the inversion.
lstsq - Uses Numpy’s lstsq to perform the inversion.
Outputs#
The outputs of the function are:
\(\xi\) - The value of \(\xi\) at the end of the linear least squares.
time - If the keyword argument timer = True, then the second output is the time the linear least-squares took; otherwise, there is no second output.
As a demonstrative example, suppose one wanted to approximate the function \(y = a e^{b x}\) using a linear expansion of Chebyshev polynomials. Let the coefficients in that expansion be \(\xi\).
[1]:
import jax.numpy as np
from tfc.utils import BF, LS, MakePlot
# This line is added for Python notebooks but is not necessary in a regular Python script.
%matplotlib inline
# Create the true data
a = 1/3
b = 2
x = np.linspace(0,1,101)
y = a*np.exp(b*x)
# Create the Chebyshev polynomials
cp = BF.CP(0.,1.,np.array([-1],dtype=np.int32),20)
H = cp.H(x,0,True)
# Create the approximating function
g = lambda xi: np.dot(H,xi)
# Create the residual function
L = lambda xi: g(xi)-y
# Solve for the unknowns using LS
xi0 = np.zeros(H.shape[1])
xi,time = LS(xi0,L,timer=True)
# Plot and print results
p = MakePlot('x','y')
p.ax[0].scatter(x[::10],y[::10],color='r',label='True data',zorder=3)
p.ax[0].plot(x,g(xi),'b-',label='LS Approximation')
p.ax[0].legend()
p.show()
print("LS run time: "+str(time)+" seconds.")
print("Maximum error: "+str(np.max(np.abs(L(xi)))))
LS run time: 0.00033550499999979166 seconds.
Maximum error: 4.440892098500626e-15
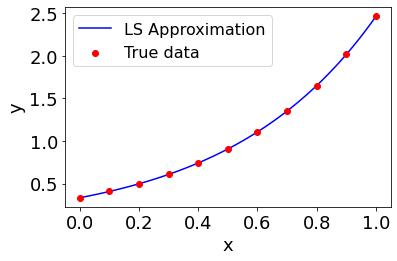
As one can see, parameters \(\xi\) were found in less than a millisecond that minimize the loss function. As mentioned earlier, this can be done not just for arrays of unkowns, but TFCDicts and TFCRobustDicts as well. In addition, the loss functions can take extra arguments other than the unknown parameters. For example, suppose we have a dictionary of unknowns used in our approximating function \(g\), and that \(g\) also takes in some other arguments.
[2]:
from tfc.utils import TFCDict
# Create the approximating function
g = lambda xi,c1,c2: c1*np.dot(H,xi['xi1'])+c2*np.dot(H,xi['xi2'])
# Create the residual function
c1 = 2.
c2 = 1.
L = lambda xi,c1,c2: g(xi,c1,c2)-y
# Solve for the unknowns using LS
xi = TFCDict({'xi1':np.zeros(H.shape[1]),
'xi2':np.zeros(H.shape[1])})
xi,time = LS(xi,L,c1,c2,timer=True)
# Plot and print results
p = MakePlot('x','y')
p.ax[0].scatter(x[::10],y[::10],color='r',label='True data',zorder=3)
p.ax[0].plot(x,g(xi,c1,c2),'b-',label='LS Approximation')
p.ax[0].legend()
p.show()
print("LS run time: "+str(time)+" seconds.")
print("Maximum error: "+str(np.max(np.abs(L(xi,c1,c2)))))
LS run time: 0.001074996999999911 seconds.
Maximum error: 3.83026943495679e-15
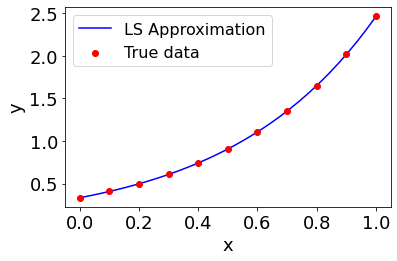
The \(\xi\) parameters that minimize the residual function were found in a matter of milliseconds.
Linear least-squares class (LsClass)#
The LsClass is designed to be used when the linear least-squares must be called multiple times. The class saves the JIT-ed linear least-squares function which can be called via the run method, whereas the LS function just runs it once. The LsClass is initialized in the same way the LS function is, except the *args positional argument is eliminated; The *args argument is only used when calling the run method. The run method only takes in the two position arguments \(\xi\)
and *args, and the outputs are the same as the LS outputs. To demonstrate, consider the previous example, but run it in a for loop for different values of \(c_1\) and \(c_2\).
[3]:
import numpy as onp
from tfc.utils import LsClass
# Create the LsClass
ls = LsClass(xi,L,timer=True)
# Allocate memory
c1 = np.linspace(1,2,10)
c2 = np.linspace(0.5,1.5,10)
err = onp.zeros_like(c1)
time = onp.zeros_like(c2)
xi0 = TFCDict({'xi1':np.zeros(H.shape[1]),
'xi2':np.zeros(H.shape[1])})
# Run the linear least-squares for different values of c1 and c2
for k in range(c1.shape[0]):
xi,time[k] = ls.run(xi0,c1[k],c2[k])
err[k] = np.max(np.abs(L(xi0,c1[k],c2[k])))
print("LS average run time: "+str(np.mean(time))+" seconds.")
print("Maximum error: "+str(np.max(err)))
LS average run time: 0.0011542637999998994 seconds.
Maximum error: 3.83026943495679e-15
Once again, \(\xi\) parameters were found in a matter of milliseconds that minimize the maximum residual value to in every case.